Mähen ohne Begrenzungskabel zur Umrüstung
OpenMower – Mähroboter mit GPS/RTK auf Basis von Yardforce Mähern
Das OpenMower Projekt macht aus einem "dummen" Yardforce Mähroboter einen GPS/RTK-Mäher, der ohne Begrenzungskabel auskommt.
Mähroboter sind eine tolle Sache, wenn da nicht das Begrenzungskabel wäre. Gerade bei komplexeren Grundrissen und vielen Hindernissen wie Sträuchern, Pools, Bäumen, Beeten etc. ist die Verlegung eines Begrenzungskabels eine recht mühsame Angelegenheit. Nicht selten darf man sich auch auf Fehlersuche begeben, wenn das Kabel mal wieder eine Unterbrechung hat.
Kommerzielle Mähroboter mit GPS/RTK sind noch sehr rar und auch teuer. Husqvarna hat seit 2020 das EPOS-System am Start, das mit UVP 5.799 Euro für den Mäher, plus 1.199 Euro für die Referenzstation zu Buche schlägt und sich an professionelle Anwender wendet.
Segway hat den Navimow angekündigt, der wohl zwischen 1.199 und 2.499 Euro kosten soll und damit den Markt aufmischen könnte – wenn er denn schon erhältlich wäre. Ursprünglich sollte er noch in der ersten Jahreshälfte 2022 in die Läden kommen.

Weiter sind hier Projekte wie der Ardumower mit Sunray-Firmware und GPS/RTK-Unterstützung. Dieser bearbeitet auch unseren Rasen. Von den Machern gibt es mit dem „Alfred Mähroboter“ auch eine kommerzielle Version, die man fix und fertig kaufen kann und dessen Chassis auf einer gängigen Plattform basiert.

Hol‘ dir meinen Newsletter!
OpenMower – Yardforce Mähroboter umgerüstet
Ein sehr neues Projekt ist der OpenMower von Clemens Elflein. Auch er setzt auf die Navigation per GPS/RTK. Als Plattform nutzt er die sehr preiswerten Yardforce Mähroboter. Diese bieten ideale Voraussetzungen, wie Brushless-Motoren für Mähwerk und Antrieb, ein wasserdichtes Gehäuse mit Einstellung der Mähhöhe und insgesamt eine sehr ordentliche Verarbeitung. Zudem sind bereits Akku und Ladestation dabei.
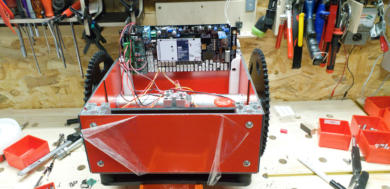
Clemens hat ein neues Mainboard für den Yardforce Classic 500 (und auch der Yardforce SA650ECO ist in Arbeit) entwickelt, das gegen das Originalboard ausgetauscht wird. Dabei können die vorhandenen Stecker einfach mit dem OpenMower-Board verbunden werden. Selbst das Original-Bedienteil soll weiter nutzbar bleiben.
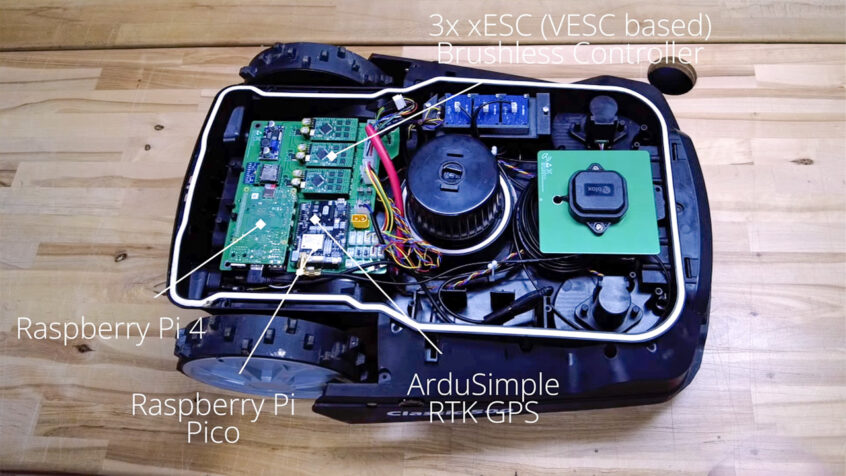
Technisch ist die Lösung ganz nach meinem Geschmack: Ein Raspberry Pi 4 ist das Herz des Systems und bietet damit reichlich Rechenpower, Schnittstellen und Möglichkeiten für Erweiterungen, API usw. Die Low-Level-Aufgaben wie die Motoransteuerung usw. übernimmt ein Raspberry Pico RP2040 Microcontroller.
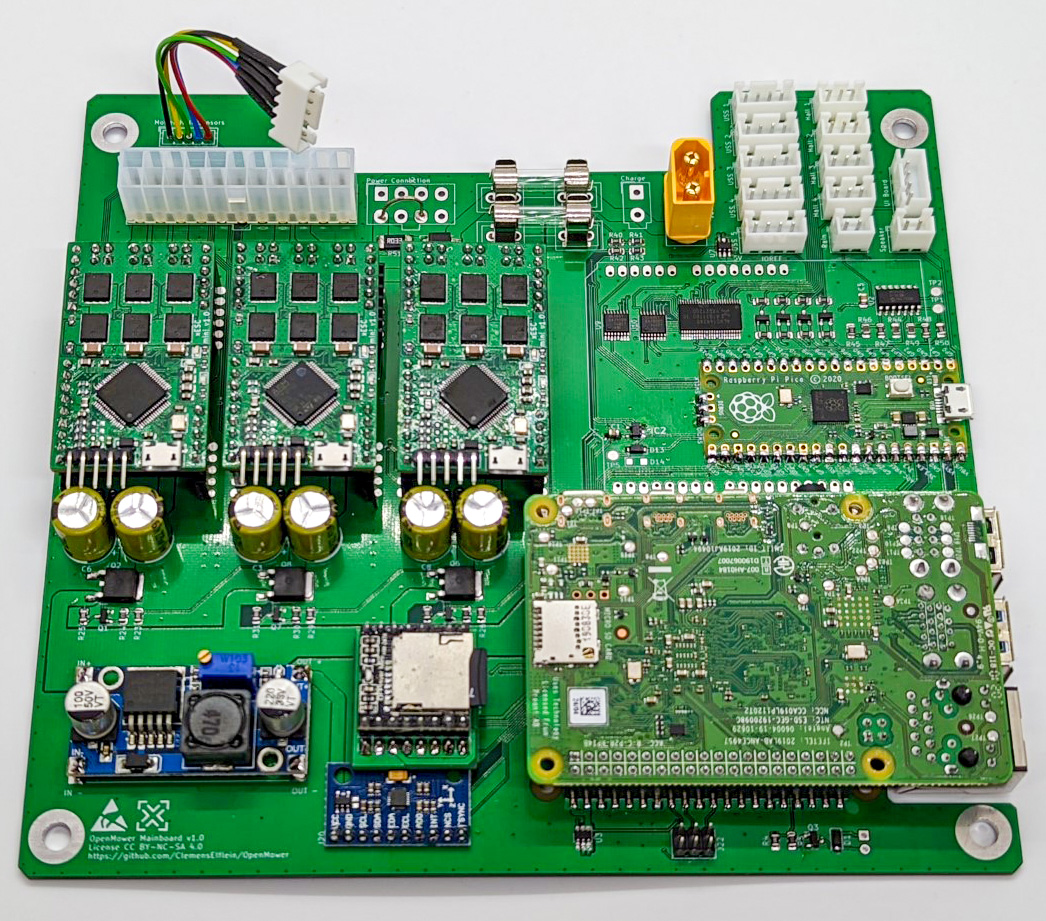
Für den GPS/RTK-Empfang setzt auch der OpenMower das ArduSimple-Kit, das leider noch immer den teuersten Posten beim Umbau ausmacht und das auch beim Ardumower GPS/RTK-Projekt zum Einsatz kommt. Clemens hat auch eigene ESC (Electronic Speed Controller) entwickelt.
Angelernt wird der OpenMower durch das Abfahren des Mähbereichs und der Verbotszonen. Dies wird mit einem Xbox-Controller gesteuert. Hat der Mäher seine Karte, kann er GPS-gesteuert systematisch in Linien mähen.
Das funktioniert auch bereits. Was derzeit noch fehlt, ist eine Benutzeroberfläche. Clemens will auch eine native iOS- und Android-App zur Verfügung stellen.
Noch sehr viel interessanter ist, dass man mit dem OpenMower-Board wohl auch viele andere Mähroboter nachrüsten könnte, da viele auf der gleichen Plattform basieren. So sind die Ferrex Mähroboter von Aldi umgelabelte Yardforce Roboter und der Ferrex 800 hat das gleiche Board eingebaut, wie der Yardforce SA650ECO.
Den Yardforce SA650ECO bekommt man manchmal schon für unter 300 Euro. Das simpleRTK Kit muss(te) man mit 800 Euro veranschlagen. Ein Raspi 4 (sofern momentan überhaupt erhältlich) und die restlichen Komponenten, würde ich unter normalen Umständen mit 150 Euro veranschlagen. Man könnte also für gut 1.200 Euro einen GPS-Mähroboter realisieren, der auf einer bewährten Plattform basiert. Mit ein bisschen Glück kann man das Original-Mainboard dann als Ersatzteil auf Ebay verkaufen. Leider schlägt die Chip-Krise momentan voll ins Kontor, sodass nicht nur das OpenMower-Projekt darunter leidet, weil Verfügbarkeit und Preise bizarre Züge angenommen haben.

Mehr Infos gibt es hier: OpenMower – The DIY Smart Robot Mower for Everyone – x-tech.online. Hier könnt ihr auch Platinen für das Mainboard bestellen.
Das Projekt selbst ist bei GitHub gehostet:
Für die Software gibt es ein eigenes Repository:
GitHub – ClemensElflein/open_mower_ros
Wer mitmachen und mehr erfahren möchte, kann dem OpenMower Discord Server beitreten. Die Geschwindigkeit, mit denen das Projekt vorangetrieben wird, ist auf jeden Fall sehr beachtlich. Hard- und Software sind beim OpenMower durchgängig OpenSource. Ich bin gespannt, was bald alles möglich sein wird.
Unterstützen könnt ihr das Projekt bei Patreon: Clemens Elflein bietet Open Source Projects, OpenMower, xESC, self-o-mat | Patreon
Melde dich zu meinem Newsletter an!
Du kannst dich jederzeit abmelden und ich verspreche: Kein Spam!
Die mit Sternchen (*) gekennzeichneten Verweise sind sogenannte Provision-Links. Als Amazon-Partner verdiene ich an qualifizierten Verkäufen.Wenn du auf so einen Verweislink klickst und über diesen Link einkaufst, bekomme ich von deinem Einkauf eine Provision. Für dich verändert sich der Preis nicht und du unterstützt damit meine Arbeit. Preisänderungen und Irrtümer vorbehalten.